
EN
EN
PRODUCTS AND SOLUTIONS
STANDARD ROBOTIC LASER WEIDING MACHINE
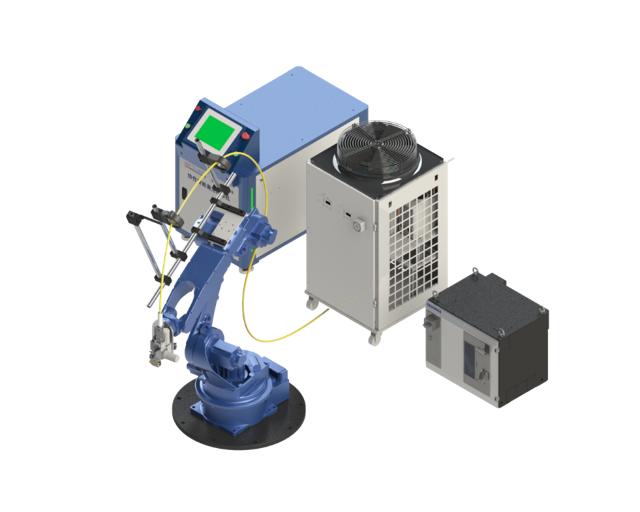

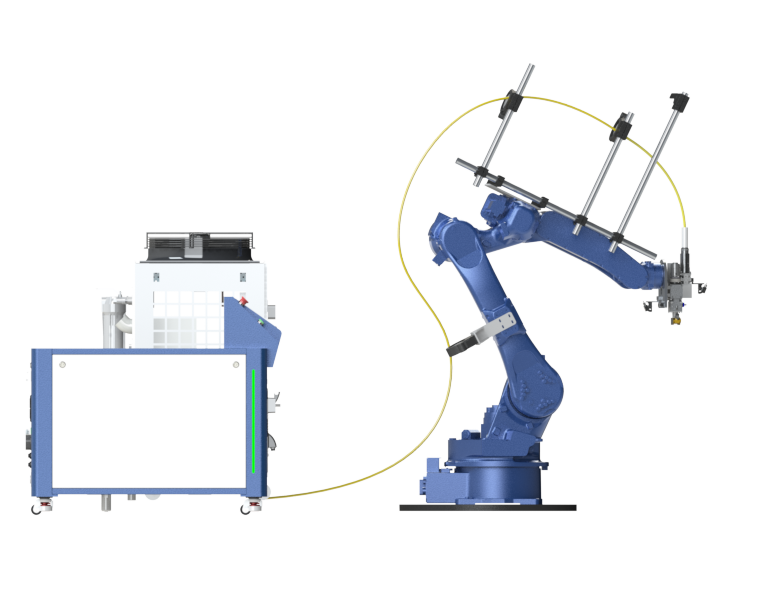
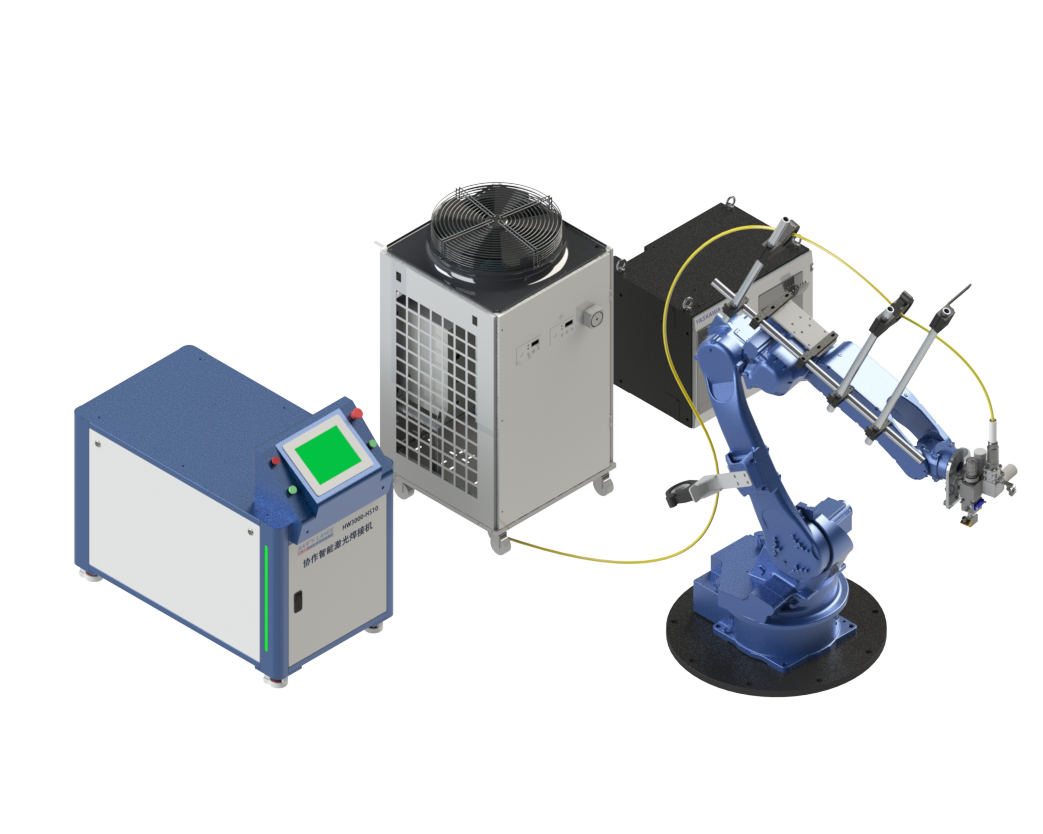
The standard robot laser welding workstation is the latest basic welding workstation launched by Jiangsu Hans, based on the combination of industrial robot, laser and laser welding head, it can load the fixture and positioner selected by users to form a set of automatic welding equipment.
The equipment configuration is simple, affordable, fast delivery time, high scalability; Can meet a variety of welding craft, a wide range of application, suitable for all industries.
Basic configuration, affordable
Free combination, strong expansibility
Easy to change, wide applicability
General configuration, short delivery time
Complete configuration, powerful features
Swing welding, beautiful weld joint
Safety circuit, safe and reliable
No. | Name | Unit | Specification/ Parameter | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
1 | Model | - | HW2000-KR10 | HW3000-KR10 | HW4000-KR10 | HW2000-KR20 | HW3000-KR20 | HW4000-KR20 | HW2000-FR12 | HW3000-FR12 | HW4000-FR12 | HW2000-FR25 | HW3000-FR25 | HW4000-FR25 | HW2000-MR25 | HW3000-MR25 | HW4000-MR25 | HW2000-MR35 | HW3000-MR35 | HW4000-MR35 |
2 | Optical-fiber laser | W | 2000 | 3000 | 4000 | 2000 | 3000 | 4000 | 2000 | 3000 | 4000 | 2000 | 3000 | 4000 | 2000 | 3000 | 4000 | 2000 | 3000 | 4000 |
3 | Optical-fiber | m | 10 | 15 | 20 | 10 | 15 | 20 | 10 | 15 | 20 | 10 | 15 | 20 | 10 | 15 | 20 | 10 | 15 | 20 |
4 | Swing welding head | - | Standard | |||||||||||||||||
5 | Robot | - | KUKAKR10 R1420 | KUKAKR20 R1810 | FANUCM-10iD/12 | FANUCM-20iD/25 | YASKAWAGP25-1730 | YASKAWAGP35L-2538 | ||||||||||||
6 | Water chiller | - | Standard | |||||||||||||||||
7 | Control system | - | Embedded system and robot control system integration | |||||||||||||||||
8 | Wire feeder | - | Standard | |||||||||||||||||
9 | Accessories | - | Standard(goggles 1/ protective lens 3/ wire feeder 4/ wire feeding wheel 4) | |||||||||||||||||
10 | Laser wavelength | nm | 1080±3 | |||||||||||||||||
11 | Working model | - | Continuance/ Modulation | |||||||||||||||||
12 | Robot load | kg | 10 | 20 | 12 | 25 | 25 | 35 | ||||||||||||
13 | Robot arm span | mm | X:1420,Y:1720 | X:1813,Y:2173 | X:1441,Y:2616 | X:1831,Y:3461 | X:1730,Y:3089 | X:2538,Y:4448 | ||||||||||||
14 | Welding speed | m/min | 0~5(Different due to model/ thickness of plate) | |||||||||||||||||
15 | Swing frequency | Hz | 300 | |||||||||||||||||
16 | Swing amplitude | mm | 0~5 | |||||||||||||||||
17 | Working ambient temperature | ℃ | 10~40 | |||||||||||||||||
18 | Working ambient humidity | % | <70 | |||||||||||||||||
19 | Max penetration | mm | 4 | 6 | 8 | 4 | 6 | 8 | 4 | 6 | 8 | 4 | 6 | 8 | 4 | 6 | 8 | 4 | 6 | 8 |
20 | Welding cracks | mm | ≤0.5(Different due to model/ thickness of plate/ structure of workpiece) | |||||||||||||||||
Note: Max penetration varies by Model, material, speed, etc. and is not an acceptance item.

